Abstract
Robotic object singulation, where a robot must isolate, grasp, and retrieve a target object in a cluttered environment, is a fundamental challenge in robotic manipulation. This task is difficult due to occlusions and how other objects act as obstacles for manipulation. A robot must also reason about the effect of object-object interactions as it tries to singulate the target. Prior work has explored object singulation in scenarios where there is enough free space to perform relatively long pushes to separate objects, in contrast to when space is tight and objects have little separation from each other. In this paper, we propose the Singulating Objects in Packed Environments (SOPE) framework. We propose a novel method that involves a displacement-based state representation and a multi-phase reinforcement learning procedure that enables singulation using the 16-DOF Allegro Hand. We demonstrate extensive experiments in Isaac Gym simulation, showing the ability of our system to singulate a target object in clutter. We directly transfer the policy trained in simulation to the real world. Over 250 physical robot manipulation trials, our method obtains success rates of 79.2%, outperforming alternative learning and non-learning methods.
Overview of SOPE Framework
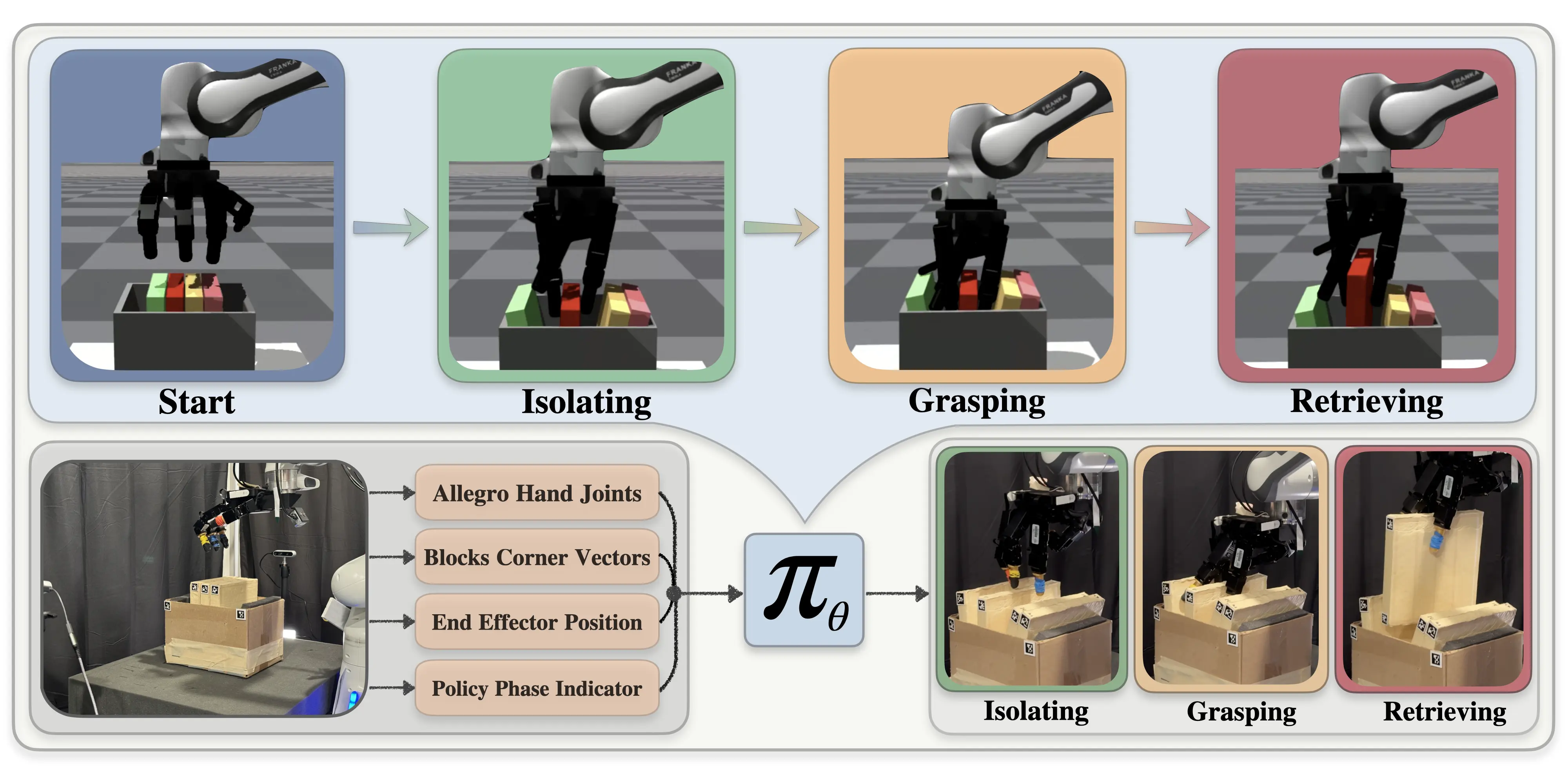
Overview of our proposed SOPE framework for object singulation, shown here with the Allegro Hand. The task involves three phases: isolating, grasping, and retrieving. We train a policy in simulation using phase-dependent reward functions. The policy uses the hand joints, the block positions, and the robot arm in the state representation. We directly transfer the trained policy to the real world.
Physical Environment Setup
Have a look around our experimental setup. You may zoom in and out and drag to interact with the model.
Slow Motion Delight
See our robot having a great bounce and block play!
View every detail of the robot's playful interaction by enjoying these amazing slow-motion videos.
Policy Performance Under Different Environments
Three Blocks
Four Blocks (Normal)
Four Blocks (Packed)
Policy Performance Under Human Intervention
See our hand's robustness as it effectively singulates the block against human intervention.
These videos highlight the strength and flexibility of our design.
Videos of All Experiments
To maximize transparency, we provide our full experiment record with videos of all trials in the table below. Check out our Clapperboard system - it helps us keep tabs on every experiment and makes it super easy for you to see what we've been up to.
BibTeX
@inproceedings{Hao2024SopeDex,
author = {Hao Jiang and Yuhai Wang and Hanyang Zhou and Daniel Seita},
title = {{Learning to Singulate Objects in Packed Environments using a Dexterous Hand}},
booktitle = {International Symposium on Robotics Research (ISRR)},
year = {2024}
}
Acknowledgement
Website template modified from NeRFies and Lessons from Learning to Spin “Pens”.
This website is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
We thank
Chen Wang,
Yuzhe Qin,
Haozhi Qi
and
Binghao Huang
for helpful advice on using the Allegro Hand with Isaac Gym and on
setting up the real world experiments.
We thank Vedant Raval and Harshitha Rajaprakash for helpful writing
feedback.